20 октября, 2012
ПОРИ (5Д91) как этап в развитии РТВ ПВО
В учебниках по тактике радиотехнических войск (РТВ), изданных в 1970-е гг., которые основывались на действовавших в то время нормативных документах, говорилось, что основу вооружения РТВ составляли радиолокационная техника (радиолокационные комплексы и радиолокационные станции) различных классов и назначения, автоматизированные системы управления (АСУ) и средства связи.
Ветераны радиотехнических войск являются свидетелями и участниками внедрения, освоения и боевого применения многих передовых разработок отечественного оборонно-промышленного комплекса, к числу которых, безусловно, относится аппаратура автоматизации «Пост обработки радиолокационной информации» (ПОРИ) или АСУ КП радиотехнического батальона ПОРИ (изделие 5Д91).
Сегодня есть все основания утверждать, что применение АСУ КП радиотехнического батальона ПОРИ (изделие 5Д91) для решения задач радиолокационного обеспечения (РЛО) являлось не выполнением технической и технологической доработки по бюллетеню, а именно инновационным решением, которое позволило резко повысить качество РЛО и имело большое практическое значение.
Со времени принятия ПОРИ (5Д91) на вооружение прошло много лет, изделие уже давно не поставляется в войска, однако оно оставило заметный след в истории автоматизации сбора и обработки радиолокационной информации в радиотехнических войсках.
Комплексы АСУ командных пунктов и пунктов управления (КП/ПУ) подразделений РТВ начали поступать в войска в 1960 г., когда была принята на вооружение АСУ «Воздух-1» (ВП-1С, ВП-01, ВП-02У). В дальнейшем развитие АСУ РТВ велось по пути наращивания их тактико-технических характеристик. Достаточно хорошо известны АСУ КП (ПУ) подразделений РТВ:
- ВП-01М, ВП-02М, ВС-11М АСУ «Воздух-1М»;
- «Низина-Н» (5Н53Н МВП-1) и «Низина-У» (5Н53У), «Межа» (5Н53 АРТУ-1) и «Межа-М» (5Н93М) АСУ «Луч»;
- «Поле» (86Ж6), «Основа» (5Н60) и «Основа-1» (68К6) АСУ «Пирамида»;
- «Фундамент-1», «Фундамент-2», «Фундамент-3» АСУ «Фундамент».
Однако ветераны РТВ, которым пришлось выполнять задачи РЛО КП зенитных ракетных войск (ЗРВ) и истребительной авиации (ИА) ПВО, хорошо помнят и другие комплексы автоматизации, которые в то время (особенно в районах Севера и Дальнего Востока) позволили существенно повысить качество решения задач управления, целераспределения, целеуказания и наведения. Особое место в ряду таких комплексов, безусловно, принадлежит АСУ КП радиотехнического батальона ПОРИ (изделие 5Д91).
СОСТАВ И НАЗНАЧЕНИЕ ПОРИВ 1965 г. на предприятии «Вектор» (г. Свердловск), ныне ОАО «УПО «Вектор» (г. Екатеринбург), разработана качественно более совершенная цифровая вычислительная техника на новой (для того времени) элементной базе – феррит-транзисторных ячейках. На их основе созданы системы обработки информации нового поколения, в том числе АСУ ЗРВ и АСУ РТВ. Элементной базой этих АСУ были транзисторные схемы переключения тока, из которых на печатных платах строились модули – функциональные узлы различного назначения.

Двухкоординатная РЛС П-35/37 использовалась для получения азимута и дальности цели, а для определения точного значения высоты воздушных объектов применялся подвижный высотомер типа ПРВ-13
Фото: Георгий ДАНИЛОВ
Первые образцы АСУ ЗРВ «Вектор» и АСУ РТВ ПОРИ (изделие 5Д91) выпущены в 1967 г. В состав этих комплексов входили ЭВМ 5Э63-1 с программным обеспечением на основе прошиваемых блоков запоминающих устройств. Оперативная память строилась на ферритовых матрицах. На основе наработок, полученных при разработке АСУ ЗРВ «Вектор» и АСУ РТВ ПОРИ, в дальнейшем были разработаны и поставлены на производство комплексы АСУ ЗРВ «Сенеж» и АСУ ИА ПВО «Рубеж».
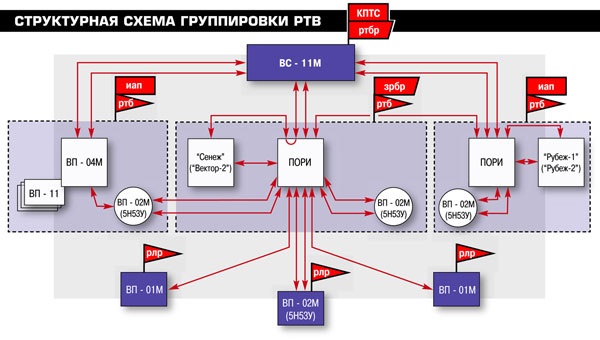
Радиотехнический батальон (ртб), оснащенный аппаратурой автоматизации ПОРИ, был предназначен для ведения радиолокационной разведки средств воздушного нападения противника, автоматизированного сбора радиолокационной информации, ее обработки и автоматической выдачи на вышестоящий, обеспечиваемый и взаимодействующий командные пункты.
В состав радиотехнического батальона входили командно-технический узел (КТУ), оснащенный аппаратурой автоматизации ПОРИ и ВП-02М (5Н53У, 5У69); радиолокационный узел, оснащенный радиолокационными дальномерами и высотомерами; две – четыре радиолокационные роты (рлр), узла.
Радиотехнический батальон был способен обеспечить радиолокационной информацией:
- КП радиотехнической бригады (ртбр), радиотехнического полка (ртп), которые оснащены аппаратурой ВС-11М;
- КП зенитной ракетной бригады (зрбр), зенитного ракетного полка (зрп), которые оснащены аппаратурой «Вектор-2» («Сенеж»), АСУРК-1МА (1П);
- КП истребительного авиационного полка, оснащенный аппаратурой «Рубеж» (ВП-04М);
- КП взаимодействующего радиотехнического батальона, оснащенный аппаратурой ПОРИ.
Подчиненные подразделения оснащались аппаратурой автоматизации ВП-02М (ВП-01М, ВП-02У, ВП-1С) или 5Н53У (5Н53Н, 5У69). При этом для ведения радиолокационной разведки и PJIOЗРВ (авиации ПВО) в условиях применения активных шумовых помех не менее трех подразделений оснащались аппаратурой автоматизации ВП-02М или 5Н53У (5У69) и радиолокационными средствами с пеленгационными каналами.
Для увеличения глубины радиолокационного поля батальона на КП ртб был организован автоматизированный прием информации от одного-двух соседних радиотехнических батальонов.
Аппаратура автоматизации ПОРИ (5Д91) размещалась в шести кабинах: кабина боевого управления 5Д98, кабина вычислительного комплекса 5Э64, кабина связи 5Д97-А, кабина дизельной электростанции 5Е96, распределительно-преобразовательная кабина 5Е88, кабина ЗИП 5Д92-П.
В кабине боевого управления была размещена аппаратура, обеспечивающая боевой расчет ПОРИ средствами отображения, управления процессом обработки информации и управления подразделениями.
Основу аппаратуры кабины боевого управления составляли шесть автоматизированных рабочих мест (АРМ), которые обеспечивали наблюдение информации, поступающей от подразделений; наблюдение информации оповещения, команд управления и целеуказания с вышестоящего, обеспечиваемого и взаимодействующего командных пунктов; наблюдение пяти контрольных формуляров, а также результатов контрольных съемов информации операторами подразделений; завязку трасс локационных целей и постановщиков активных помех; ввод в вычислительный комплекс ПОРИ команд на обработку информации и управление подразделениями; селекцию информации, отображаемой на экранах АРМ; телефонные переговоры с внешними абонентами и лицами боевого расчета ПОРИ; громкоговорящую связь с лицами боевого расчета ПОРИ.
Работу АРМ обеспечивали буферное запоминающее устройство, осуществляющее прием из ВК, запись и хранение информации, подлежащей отображению; формирователь программ отображения, осуществляющий разбор информации, хранимой в БЗУ, и ее выдачу на АРМ для отображения по двум программам; аппаратура синхросигналов.
В кабине вычислительного комплекса размещались аппаратура вычислительного комплекса, состоящего из двух ЭВМ (основной и резервной), аппаратура приема и передачи данных, а также аппаратура тренажа и документирования. Вычислительный комплекс обеспечивал автоматизацию процессов обработки информации по заложенной в ЭВМ программе.
Аппаратура приема и передачи данных преобразовывала информацию к виду, необходимому для ввода и обработки в ЭВМ (при приеме), а также обработанную информацию к виду, необходимому для передачи по соответствующим каналам связи.
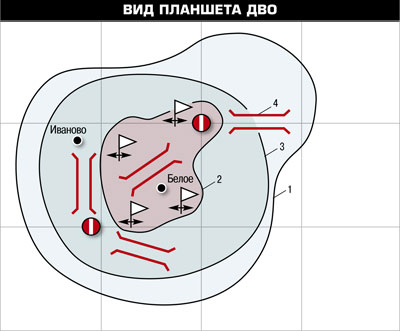
1 – зона обнаружения группировки на H – 10 000 м;
2 – зона обнаружения на высоте, соответствующей нижней границе сплошного радиолокационного поля группировки;
3 – потребный рубеж выдачи РЛИ для РЛО БД зрбр;
4 – коридоры пролета авиации.
Аппаратура тренажа и документирования позволяла вести объективный контроль за работой подразделений и возможность тренировки боевого расчета ПОРИ без участия подразделений путем создания и воспроизведения магнитофильмов.
В кабине связи была размещена аппаратура связи и тревожной сигнализации, которая обеспечивала образование необходимого числа телекодовых, оперативно-командных и служебных каналов связи с вышестоящим, обеспечиваемым, взаимодействующим КП и подразделениями. Кроме того, в кабине связи размещалась аппаратура для организации внутренней телефонной, громкоговорящей связи.
В кабине дизельной электростанции (ДЭС) были размещены основной и резервный агрегаты питания АД-100, обеспечивавшие аппаратуру ПОРИ электроэнергией трехфазного переменного тока напряжением 380 В, 50 Гц, мощностью 100 кВт каждый. В распределительно-преобразовательной кабине размещалась аппаратура дистанционного управления агрегатами питания, преобразователи напряжения частоты 50 Гц в напряжение частотой 400 Гц (ПСЧ-50 – 2 шт. и ПСЧ-15 – 1 шт.), а также вспомогательный агрегат питания АД-30, который обеспечивал электропитание при ремонте и настройке аппаратуры отдельных кабин.
В кабине ЗИП были размещены контрольно-измерительные приборы, запасные блоки, кассеты и модули, а также специальные стенды для проверки, настройки и ремонта аппаратуры ПОРИ, комплект слесарных и радиомонтажных инструментов.
Кабины боевого управления, вычислительного комплекса, связи и ЗИП конструктивно были выполнены на базе полуприцепов типа «936» с герметизированным кузовом, который был оборудован системой вентиляции, кондиционирования (кроме кабины ЗИП) и фильтровентиляционными установками.
ВОЗМОЖНОСТИ ПОРИАппаратура ПОРИ обеспечивала прием информации от пяти подразделений в масштабе 300 или 600 км по 31 локационной цели (пеленгу на ПАП) от каждого подразделения. От трех подразделений, оснащенных аппаратурой автоматизации ВП-02М или 5Н53У (5У69), был возможен прием информации по двум каналам одновременно в масштабе 300 (600) км.
Подразделения, оснащенные ВП-02М (ВП-01М, 5Н53У, 5У69), передавали на ПОРИ следующую информацию: плоскостные координаты локационных целей (х, у), высоту (Н), признак государственной принадлежности (ГП), характеристики целей – количество и тип (К, Т), служебный номер цели (Nсл.), условные координаты пеленгов (хп, уп), условную высоту пеленгов (Нусл.), признак потери цели – конец передачи (КП), дополнительные характеристики целей и донесения циклом 2Z.
При оснащении подразделений аппаратурой ВП-02У (ВП-1С) прием информации осуществлялся по одному каналу в масштабе 300 км. При этом подразделения передавали на ПОРИ следующую информацию: плоскостные координаты локационных целей (х, у), высоту (Н), признак государственной принадлежности (ГП), характеристики целей и донесения циклом Z. Информация о плоскостных координатах целей должна была поступать с дискретностью 10 с., о высоте полета – с дискретностью 1 мин., а по целям, маневрирующим высотой, – 20 с.
Условные обозначения лиц боевого расчета совмещенного КП:
1 – командир зрбр
2 – начальник штаба зрбр
3 – офицер боевого управления зрбр
4 – начальник ПН
5 – штурман
6 – начальник разведки зрбр
7 – командир ртб
8 – начальник КТУ
9 – начальник отделения управления и отображения
10 – дежурный офицер ПОРИ
11 – начальник смены КБУ
12 – начальник штаба ртб
13 – оперативный дежурный КП ртб
14 – начальник смены КВК
15 – начальник отделения связи
16 – начальник смены КС
17 – начальник РЛУ
18 – начальник смены ВП-02М
19 – старший инженер РЛК 5Н87
20 – начальник РЛС 5Н84 (П-37)
21 – оператор АСУ (5Д91 ВП-02М)
22 – планшетист
23 – радиотелеграфист
24 – механик АТД
25 – телефонист коммутатора П-194М
26 – начальник отделения энергоснабжения
27 – электромеханик-дизелист
28 – механик аппаратуры обработки информации ВП-02М
29 – оператор РЛК (РЛС) ПРВ
30 – наблюдатель поста визуального наблюдения
31 – дежурный по связи
32 – начальник смены РЛК 5Н87
33 – радиомеханик
34 – считывающий на планшет контроля выдачи информации
35 – офицер РТВ – направленец на ПН ИА
Аппаратура ПОРИ обеспечивала прием информации о 60 локационных целях от КП ртбр, оснащенного аппаратурой ВС-11М, по двум каналам связи в масштабе 600 км.
С КП ртбр (ртп) на ПОРИ поступала следующая информация: плоскостные координаты целей (х, у), высота (Н), признак государственной принадлежности (ГП), характеристики целей – количество и тип (К, Т), служебный номер цели (Nсл.), номер цели единый (Nед.), команды циклом 2Z, контрольное сообщение из шести слов.
Кроме того, аппаратура ПОРИ обеспечивала прием информации о боевой задаче от КП соединения ПВО, оснащенного ВС-11М, по двум каналам боевого управления. По одному каналу поступала боевая задача для зрбр, по второму – для ПН ИА. Принятая информация о боевой задаче ретранслировалась на КП зрбр и ПН ИА.
Аппаратура ПОРИ обеспечивала прием информации о 40 локационных целях от соседнего (взаимодействующего) батальона, оснащенного аппаратурой ПОРИ, по одному каналу связи в масштабе 1200 км.
С КП взаимодействующего ртб на ПОРИ поступала следующая информация: плоскостные координаты целей (х, z), высота (Н), составляющие скорости (Vx, Vz), характеристики целей – количество (К), признак государственной принадлежности (ГП), служебный номер цели (Nсл.), номер цели единый (Nед.), признак постановщика активных помех (ПрП), признак маневра цели курсом (ПрМ), признак потери цели (ПрПЦ), признак воздействия по цели 3PК или ИА (ПрВЗ), признак обновления высоты полета цели (ПрОН), признак фиктивности высоты полета цели (ПрФН), признак экстраполяции (ПрЭ), контрольное сообщение из шести слов.
По информации, принятой от подразделений, вышестоящего и взаимодействующего КП, на ПОРИ обрабатывалось 40 локационных целей (в том числе до шести ПАП), действующих в радиусе 1200 км на высотах до 40 км со скоростью полета до 4000 км/ч.
При этом аппаратура ПОРИ автоматически решала следующие задачи: пересчет координат входной информации к точке стояния КП батальона и ее отображение на экранах индикаторов АРМ в масштабах 300, 600, 1200 км на I программе и в масштабе 600 км на II программе; пересчет наклонных координат в горизонтальные (если информация поступает от ВП-1С, ВП-02У); захват и сопровождение локационных целей (завязку трасс); расчет параметров движения (координат, курса и скорости), сглаживание и экстраполяцию координат локационных целей на момент выдачи информации, а также выявление маневра цели курсом; отождествление информации об одной и той же цели, данные о которой поступают от нескольких подразделений; расчет параметров движения постановщиков активных помех методом триангуляции по информации подразделений, оснащенных аппаратурой ВП-02М (5Н53У, 5У69); выдачу обработанной информации на КП ртбр, КП зрбр, КП соседнего ртб, оснащенного аппаратурой ПОРИ, и подразделения; выдачу на автоматизированный КП зрбр, оснащенного аппаратурой «Сенеж», кроме информации о 40 целях, до 10 пеленгов на ПАП по данным рлу батальона (выдаваемые пеленги не используются в сопровождении ПАП на ПОРИ); выдачу в подразделения команд управления: 02 – целеуказание по цели или истребителю; 03 – сбросить цель с сопровождения; 04 – немедленно измерить высоту цели; 05 – выдавать высоту повышенным темпом; 06 – улучшить качество сопровождения цели; 07 – отмена команды на повышенный темп съема высоты; обработку результатов КФ по обмену информацией ПОРИ – рлр, ПОРИ – ПОРИ, ПОРИ – КП зрбр.
Одновременно аппаратура ПОРИ при участии лиц боевого расчета автоматизированно решала следующие задачи: захват локационных целей (завязку трасс) при запрете режима «Автозахват»; захват (завязку трасс) постановщиков активных помех; корректуру трасс целей при их сопровождении; отождествление информации об одной и той же цели, если информация не отождествляется автоматически; управление подразделениями.

Одна из основных задач РТВ – выдача радиолокационной информации потребителям – истребительной авиации и зенитным ракетным войскам
Фото: Алексей МАТВЕЕВ
Обработанная информация о 40 локационных целях, в том числе о шести ПАП, выдавалась:
- на КП ртбр (ртп) по одному или двум каналам связи в масштабе 600 км. В состав информации входили: плоскостные координаты целей (х, у), высота (Н), составляющие скорости (Vх, Vy), номер служебный (Nсл.), характеристики целей (К), признак государственной принадлежности (ГП), признак потери цели (КП), донесения циклом 2Z, контрольное сообщение из шести слов;
- на автоматизированный КП зрбр и КП соседнего батальона, оснащенного аппаратурой ПОРИ, по одному каналу связи в масштабе 1200 км. В состав информации входили: плоскостные координаты целей (х, z), высота (Н), составляющие скорости (Vx, Vz), характеристики целей (К), признак государственной принадлежности (ГП), номер цели служебный (Nсл.), номер цели единый (Nед.), признак маневра (ПрМ), признак ПАП (ПрП), признак воздействия по цели ЗРВ или ИА соседней группировки (ПрВЗ), признак потери цели (ПрПЦ), признак обновления высоты (ПрОН), признак фиктивности высоты (ПрФН), признак экстраполяции (ПрЭ);
- на КП подразделений по одному каналу связи в масштабе 600 км по целям, которые сопровождались на ПОРИ двумя и более подразделениями. В состав информации входили: плоскостные координаты целей (х, у), высота (Н), характеристики цели (К), координаты ПАП (хп, уп), признак государственной принадлежности (ГП), номер цели единый (Nед.), номер цели служебный (Nсл.).
Кроме того, на КП дивизии (корпуса) ПВО по каналу боевого управления ретранслировалась с автоматизированного КП зрбр информация о боевой готовности и боевых действиях зрбр и ПН ИА ПВО.
Обмен информацией с вышестоящим, обеспечиваемым, взаимодействующим КП и подразделениями осуществлялся с помощью штатных (табельных) средств связи. Быстродействие каналов связи в направлении на вышестоящий КП и КП подразделений – 60 бод, быстродействие каналов связи в направлении на обеспечиваемый и взаимодействующий КП – 1200 бод. Точностные характеристики выдаваемой информации зависели от типа АСУ подразделений.
Время захвата целей на сопровождение (завязка трассы) составляло: одиночных – 40–50 с., при групповом налете в режиме автозахвата – 60–70 с., при групповом налете автоматизированным способом – 120 с., шести одновременно действующих ПАП –130 с.

Увеличение дальности обнаружения маловысотных целей и целей, летящих на предельно малых высотах, достигалось поднятием на необходимую высоту фазовых центров антенных устройств
Георгий ДАНИЛОВ
Технические возможности обеспечивали приведение ПОРИ в боевую готовность с выдачей радиолокационной информации на вышестоящий, обеспечиваемый и взаимодействующий КП при питании от промышленной сети и ДЭС соответственно за 5 и 7 мин. с проведением контроля функционирования (КФ), 1,5 и 3 мин. – без проведения КФ. Общая потребляемая мощность в боевом режиме с учетом работы всех штатных средств не превышала 100 кВт.
СОСТАВ БОЕВОГО РАСЧЕТА КП РТБ, ОСНАЩЕННОГО АСУ ПОРИ (5Д91)Боевая работа в радиотехническом батальоне в зависимости от степени боевой готовности велась полным или сокращенным боевым расчетом. Полный боевой расчет возглавлял командир радиотехнического батальона, сокращенный – оперативный дежурный КП ртб.
Командир радиотехнического батальона подчинялся командиру радиотехнической бригады (полка). При решении задач РЛО боевых действий ЗРВ или ИА ПВО он оперативно подчинялся командиру обеспечиваемой части и нес ответственность за своевременность, полноту и качество радиолокационной информации (РЛИ), выдаваемой на вышестоящий и обеспечиваемый КП. Он отвечал за организацию боевой работы радиотехнического батальона и подчиненных подразделений в соответствии с поставленной задачей и сложившейся воздушной обстановкой.
Рабочее место командира радиотехнического батальона, как и рабочие места других лиц боевого расчета, было автоматизировано. Лица боевого расчета радиотехнического батальона размещались на КП ртб, в кабинах боевого управления, вычислительного комплекса, связи и ВП-02М. Командный пункт радиотехнического батальона, как правило, совмещался с командным пунктом зенитной ракетной бригады (полка) и пунктом наведения (ПН) истребительной авиации. При этом АРМ лиц боевых расчетов выносились из кабин боевого управления АСУ КП зрбр и ПОРИ в помещение совмещенного КП зрбр (зрп), ПН ИА и ртб.
Автоматизированные рабочие места ПОРИ идентичны. На АРМ операторов сопровождения целей и ПАП (АРМ-4, -5, -6) нет телефонных аппаратов и абонентских пультов. АРМ-1 командира батальона оборудован громкоговорящей связью с кабинами ПОРИ и АСУ КП зрбр. Индикатор АРМ оборудовался защитным стеклом. На защитное стекло индикатора АРМ командира батальона в масштабе 600 км специальной краской наносили точки стояния подразделений; зоны обнаружения на Н – 10 000 м и высоте, соответствующей нижней границе сплошного радиолокационного поля группировки РТВ, а также потребные рубежи выдачи радиолокационной информации на этих высотах.
В состав оборудования АРМ-1 командира ртб входили блок отображения (БО-1), пульт масштабов и контроля (ПМК), пульт команд и селекций (ПКС), телефонный аппарат рабочего места (ТАРМ) с абонентскими пультами (АП).
Для выполнения боевой задачи радиотехнический батальон развертывался на местности в боевой порядок. В состав боевого порядка входили радиолокационный узел, состоящий из РЛК (РЛС) и ПРВ, командно-технический узел, подвижная система энергоснабжения, радиопередающий и радиоприемный центры.
РЛК 5Н87 размещалась на площади 200x500 м. Дальномеры и приемопередающие кабины ПРВ, как правило, устанавливались фронтом в сторону ответственного сектора. В середине размещались прицепы «Т», ЗИП, «М», электростанции и ЦРП. На удалении 70–200 м от прицепа «Т» на площадке 40х25 м размещались прицеп «И» и аппаратура КТУ (5Д91, ВП-02М). Площадки для каждой кабины должны были быть ровными, горизонтальными, с твердым покрытием и размерами, превышающими каждое измерение кабин в плане не менее чем на два метра. Допустимые углы наклона площадок – 5 . Расстояния между кабинами 5Д91 и ВП-02М на позиции ограничиваются длиной кабельных соединений.
Позицию батальона выбирали так, чтобы обеспечивать максимальную реализацию боевых возможностей РЛК (РЛС), которые имелись на вооружении батальона. Для нее выбиралась ровная горизонтальная площадка радиусом 1000х1500 м на открытой местности на удалении не менее 5 км от лесных массивов. Имеющаяся на территории водная поверхность должна находиться в рабочем секторе, а РЛК (РЛС) и ПРВ требовалось размещать на расстоянии 100 м от берега. Средний угол наклона позиции РЛС 5Н84 не должен был быть меньше -2 и больше +0,5 . Высота неровностей на позиции РЛК (РЛС) не должна превышать: на расстоянии до 100 м от точки стояния антенного устройства – 1 метра, на расстоянии до 500–1000 м – 2–3 метров, на расстоянии до 1000–1500 м – 3–5 метров. Углы закрытия позиций РЛК (РЛС) относительно электрического центра антенн не должны были превышать: для РЛК 5Н87 – 10 мин., для РЛС П-37 – 10–15 мин., для ПРВ-13 – 30 мин.
Позиция должна была иметь подъездные пути, обеспечивавшие транспортировку прицепов тягачами «Урал-377С» и КрАЗ-255В. Позиция выбиралась на безопасном удалении от объектов вероятных ядерных ударов противника; в приграничных районах – на удалении 5–15 км от сухопутной границы.
Выбор позиции производился рекогносцировочной группой, которая назначалась под руководством командира части или его заместителя. В ее состав включались офицеры управления и служб части (в обязательном порядке специалист топографической службы), командир подразделения и начальник основной РЛС. При выборе позиции рекогносцировочная группа учитывала боевую задачу подразделения, возможности СВН по преодолению системы ПВО в данном районе и требования к позиции для типов РЛК (РЛС), состоящих на вооружении в данном подразделении.
На рекогносцировочную группу возлагались следующие задачи: выбор позиции; определение мест элементов боевого порядка; выяснение наличия подъездных путей, источников водоснабжения и электроэнергии с напряжением 10 или 6 кВ; изучение местных сетей связи и возможности использования их для боевой работы; определение объемов строительства линий связи; определение наличия местных строительных материалов и возможности использования имеющихся построек; определение объемов работ и потребных материалов для инженерного оборудования позиции, строительства подъездных путей, жилых и служебных зданий; определение возможности маскировки позиции и обеспечения защиты личного состава и вооружения от оружия массового поражения; изучение санитарно-эпидемиологического состояния района выбираемой позиции; определение наличия наблюдаемых из района позиций опорных точек (ориентиров) геодезической сети, необходимых для топопривязки элементов боевого порядка; топографическая обработка позиции и топопривязка элементов боевого порядка; определение зон видимости РЛК (РЛС) расчетным методом; составление плана позиции; оценка реализации боевых возможностей РЛК (РЛС) батальона на данной позиции в целом.
Топографическая обработка позиций РЛК (РЛС) включала определение углов закрытия, построение профилей местности в ближней и дальней зонах, определение средних углов наклона для позиций РЛС метрового и дециметрового диапазонов, определение местоположения и размеров участков земной поверхности, влияющих на формирование зон видимости РЛС.
В ходе топопривязки элементов боевого порядка предусматривались определение географических и прямоугольных координат точек стояния антенных устройств РЛК (РЛС) и ориентирных точек, определение истинного азимута с каждой ориентирной точки на опорную точку геодезической сети или другой удаленный ориентир. Ориентирная точка предназначалась для ориентирования РЛК (РЛС), она выбирались на позиции каждой РЛС так, чтобы антенное устройство наблюдалось на удалении от нее не ближе 50 м. Если с одной ориентирной точки наблюдались антенные устройства нескольких РЛС, отдельно для каждой РЛС ориентирная точка не выбиралась. Ориентирные точки обозначались знаками на местности. Топопривязка производилась на полной топооснове. Среднеквадратичные ошибки в определении азимутов не должны были превышать 1 мин., в определении прямоугольных координат – 3 м. Топопривязка элементов боевого порядка производилась подразделениями топогеодезической службы. После выбора позиции отрабатывались документы в соответствии с требованиями инструкции по облету, утвержденной в 1971 г.
До развертывания технических средств ртб производилась подготовка и инженерное оборудование позиции в целях обеспечения живучести и скрытности расположения элементов боевого порядка. Инженерное оборудование позиции ртб включало насыпи для дальномеров РЛК 5Н87 и приемопередающих кабин РЛС П-37 и ПРВ-13; укрытия для личного состава и прицепов аппаратуры 5Д91и ВП-02М, обеспечивающих защиту от оружия массового поражения; укрытия и площадки для радиоприемного и радиопередающего центров; окопы и другие оборонительные сооружения для борьбы с наземным и воздушным противником; посты визуального наблюдения, химической и радиационной разведки; заграждения, прикрывающие позицию ртб; пункты водоснабжения; укрытия для кабелей электропитания, связи и сигнализации.
Прицепы аппаратуры КТУ ртб и радиосредства могли размещаться без предварительной специальной подготовки рабочих площадок при достаточно твердом грунте. При слабом грунте для этих прицепов было необходимо подготовить рабочие площадки с твердым покрытием и подъездные пути к ним.
При развертывании ртб на позиции во время боевых действий в первую очередь производилось укрытие техники и личного состава. Для уменьшения объема инженерных работ и сокращения сроков их выполнения максимально использовались естественные и другие укрытия: овраги, лощины, канавы, выемки, подземные выработки и т. п.
В зависимости от оснащенности АСУ КП обеспечиваемых частей ЗРВ и ИА ПВО, а также от степени автоматизации КП (ПУ) радиотехнических подразделений существовали различные варианты схем организации РЛО КП ЗРВ или КП ИА ПВО. В группировках ПВО в районах Севера и Дальнего Востока часто применялся вариант организации РЛО КП зрбр с АСУ «Вектор-2В», в системе АСУ «Воздух-1П», при оснащении обеспечивающего КП ртб аппаратурой ПОРИ. В этом варианте подчиненные подразделения радиотехнического батальона передавали РЛИ требуемого качества на АСУ КП ртб ПОРИ по телекодовым каналам АСПД-1, что позволяло значительно повысить качество обработки и передачи РЛИ. Например, точность выдачи плоскостных координат повышалась в 1,5–2 раза по сравнению с типовым вариантом, а запаздывание РЛИ за счет экстраполяции практически сводилось к нулю.
Организация РЛО наведения истребителей на цели по данным АСУ КП ртб ПОРИ взамен АСУ КП ртб «Воздух-1П» также позволяла повысить качество выдаваемой для обеспечения РЛИ за счет экстраполяции положения цели по плоскостным координатам на ±500 м, по высоте – на 150 м, с дискретностью – не более 10 с. Повышалась и вероятность наведения истребителя на цель.
Для радиотехнического батальона, обеспечивавшего боевые действия зрбр (зрп) и ПН ИА ПВО, главной задачей являлось радиолокационное обеспечение их боевых действий.
Вместе с тем радиотехнический батальон в полном объеме выполнял задачу радиолокационной разведки воздушного противника и выдачи информации на вышестоящий КП ртбр (ртп) для радиолокационного обеспечения управления боевыми действиями корпуса (дивизии) ПВО.
В заключение можно сказать, что именно инновационное решение о применении аппаратуры автоматизации КП радиотехнического батальона ПОРИ (изделие 5Д91), имевшей современную для того времени ЭВМ, а также применение новейших технических решений позволили достигнуть высоких точностных и вероятностных характеристик, а также снизили время запаздывания РЛИ. Конечным итогом стало повышение качества автоматизации сбора и обработки РЛИ в подразделениях радиотехнических войск в интересах выполнения задач управления и РЛО ЗРВ и ИА ПВО.
Опубликовано 20 октября в выпуске № 5 от 2012 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?